
Shuhao Qi
Ph.D. Student
TU Eindhoven
s.qi (at) tue.nl
Experience
-
[Sep 2022 - Present] Eindhoven University of Technology
PhD Student in Control System group -
[Oct 2021 - Apr 2022] Shanghai AI Lab
Research Intern on Reinforcement Learning for Autonomous Driving -
[May 2020 - Jul 2021] Southern University of Science and Technology
Research Assistant in CLEAR Lab,on Motion Control of Legged Robot - [Sep 2017 - Jan 2020] Beihang University
M.Eng. in Control Science and Engineering
- Thesis: sEMG-based Extraction of Motion Intention and Assist-As-Needed Control of Rehabilitation Robot
- [Sep 2013 - Jul 2017] University of Electronic Science and Technology of China
B.Eng. in Mechanical and Automation Engineering
- GPA: 3.78/4.00, Rank: 5%
- Thesis: Iterative Closest Point for Laser-based SLAM
Publications
- Risk-Aware Autonomous Driving with Linear Temporal Logic Specifications
Shuhao Qi, Zengjie Zhang, Zhiyong Sun, Sofie Haesaert
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025. [Video][PDF]
-
Integrating Opinion Dynamics into Safety Control for Decentralized Airplane Encounter Resolution
Shuhao Qi, Zhiqi Tang, Zhiyong Sun, Sofie Haesaert
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025. [Video][PDF] -
Avoiding deadlocks is not enough: Analysis and resolution of blocked airplanes
Shuhao Qi, Zengjie Zhang, Zhiyong Sun, Sofie Haesaert
https://arxiv.org/abs/2411.16911, 2024. [Video][PDF] - Automated formation control synthesis from temporal logic specifications
Shuhao Qi*, Zengjie Zhang*, Sofie Haesaert, Zhiyong Sun
IEEE Conference on Decision and Control (CDC), 2023. [Video] [PDF]
- Perceptive autonomous stair climbing for quadrupedal robots
Shuhao Qi*, Wenchun Lin*, Zejun Hong, Hua Chen, Wei Zhang
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021. [Video]
- sEMG-based recognition of composite motion with convolutional neural networks
Shuhao Qi, Xingming Wu, Weihai Chen, Jianbin Zhang, Jianhua Wang
Sensors and Actuators, A: Physical (Q1, IF=2.904), 2020. [PDF]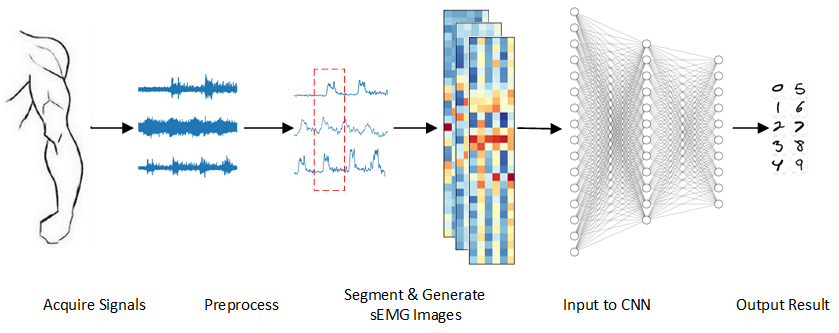
-
Recognition of composite motions based on sEMG via deep learning
Shuhao Qi, Xingming Wu, Jianhua Wang, Jianbin Zhang
S 14th IEEE Conference on Industrial Electronics and Applications (ICIEA), 2019. [Slides] -
Damping vibration analysis of a dual-axis precision force sensor based on passive eddy current
Xiantao Sun, Wenjie Chen, Weihai Chen, Shuhao Qi, Jun Jiang, Cungang Hu, Jun Tao
Journal of Physics D: Applied Physics, 2020. - Design and analysis of a large-range precision micromanipulator
Xiantao Sun, Wenjie Chen, Weihai Chen, Shuhao Qi, Wang Li, Cungang Hu, Jun Tao
Smart Materials and Structures, 2020.
Awards
- [Jun 2019] Best Paper Finalist Certificate of ICIEA2019
- [Jun 2017] Outstanding Graduate of UESTC
- [Jul 2015] National First Prize & Best Technology Award of RoboMasters
Services
- Invited Reviewer for CDC, IROS, ICRA, L4DC and TRO, etc.
Powered by Jekyll and Minimal Light theme.