Sep 2022 - Present
PhD Student, Eindhoven University of Technology
Control Systems Group, TU Eindhoven.
Academic Homepage
Ph.D. Student, TU Eindhoven
s.qi (at) tue.nl

I am a PhD candidate in the Control Systems group at TU Eindhoven, focusing on trustworthy decision-making and motion control. My research integrates temporal logic planning with safety-critical control to manage uncertainty and resolve deadlock in multi-agent interactions. I work at the intersection of control theory, game theory, formal methods, and reinforcement learning, with applications in autonomous driving and aerospace systems.
Control Systems Group, TU Eindhoven.
Reinforcement learning for autonomous driving.
CLEAR Lab, motion control of legged robots.
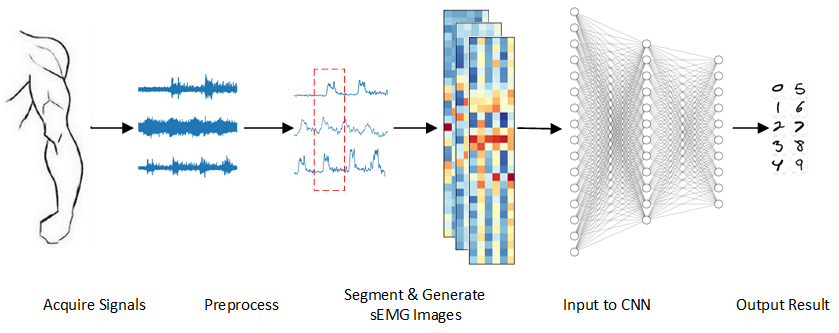
Control Science and Engineering. Thesis on sEMG-based intention extraction and assist-as-needed control for rehabilitation robots.
Mechanical and Automation Engineering. GPA: 3.78/4.00 (Top 5%). Thesis on ICP for laser-based SLAM.
Shuhao Qi, Zengjie Zhang, Zhiyong Sun, Sofie Haesaert. IROS 2025.
Shuhao Qi, Zhiqi Tang, Zhiyong Sun, Sofie Haesaert. IROS 2025.
Shuhao Qi, Zengjie Zhang, Zhiyong Sun, Sofie Haesaert. arXiv 2024.
Shuhao Qi*, Zengjie Zhang*, Sofie Haesaert, Zhiyong Sun. CDC 2023.
Shuhao Qi*, Wenchun Lin*, Zejun Hong, Hua Chen, Wei Zhang. IROS 2021.
Shuhao Qi, Xingming Wu, Weihai Chen, Jianbin Zhang, Jianhua Wang. Sensors and Actuators A: Physical, 2020.
Shuhao Qi, Xingming Wu, Jianhua Wang, Jianbin Zhang. ICIEA 2019.
Xiantao Sun, Wenjie Chen, Weihai Chen, Shuhao Qi, Jun Jiang, Cungang Hu, Jun Tao. Journal of Physics D: Applied Physics, 2020.
Xiantao Sun, Wenjie Chen, Weihai Chen, Shuhao Qi, Wang Li, Cungang Hu, Jun Tao. Smart Materials and Structures, 2020.